地球是一个被水遮蔽的行星加拿大pc28开奖网,名义约71%是海洋。大海不仅面积弘大,况且高明莫测,其中物各样种,矿产丰富。百年来,东说念主类从未住手对大海的瓦解和探索。
从海平面到水下1000米是临地空间的一部分。在这个区域中,物种的各样性组成了复杂的生态系统和丰富的海产资源,它将是东说念主类行径“向下”拓展的蹙迫空间。
然而,由于海水的不均匀特点,光泽会被接收和散射。因此,“智能光电”本领应时而生,不错罢了在昏昧的环境中对光信号进行探伤、传输,及智能化感知和分析。
中国电信东说念主工智能研究院(TeleAI)正在加快鼓励“智能光电”本领的研究使命,并与智能体、智传网(AIFlow)、AI惩办形成“三智”+“一治”的竣工战术布局。

临地空间与东说念主们的施行生计紧密关系,TeleAI但愿通过AI初始包括赛博空间、临地空间、广域空间在内的“三大空间经济”发展,进一步拓展东说念主类的行径鸿沟。
跟着机械工程、磋商机、东说念主工智能等本领的突飞大进,自主水下飞行器(AutonomousUnderwaterVehicle,AUV)的应用得到进一步发展。
从深海干与到深海开发,AUV上演着至关蹙迫的扮装。AUV简略自主飞行干与更深的水域空间,无需通过脐带电缆与其他平台流畅,就能实践各式任务。
然而,由于AUV造价上流,且捎带大王人绝顶的海洋数据,在完成任务后,频繁需要以“诱掖回收”的神态使其安全返航,保险数据竣工,并罢了开发的重迭诳骗。
为了提高AUV结尾光学诱掖回收的精度,中国电信CTO、首席科学家、中国电信东说念主工智能研究院(TeleAI)院长李学龙讲授指导团队张开久了研究,提倡了“自主水下飞行器多分支网罗光学诱掖定位顺序”。
该顺序旨在为AUV在动力补充、数据传输和辅导下达等方面提供更快的解算速率、较低的算力功耗需求以及较少的能量糜费。
关系论文已在中国杰作期刊《中国科学:信息科学》预防发表。

论文地址:
https://www.sciengine.com/SSI/doi/10.1360/SSI-2024-0183;JSESSIONID=8df64795-11e5-4fe3-8024-f4e0cd442a7c
冲破与翻新
团队搭建了基于多象限测角的光学诱掖定位硬件系统,提倡了多分支归来网罗的AUV光学诱掖定位顺序。
该顺序初次将深度网罗引入多象限测角的光学诱掖定位位置解算任务中,设想了多分支结构的位置解算归来网罗。研究了数据初始的多维度定位不断教悔顺序,构建了水下光学诱掖定位系统的物理几何关系,罢了光学诱掖硬件与算法的一体化设想。通过解算多象限光电探伤器网络的诱掖灯偏角数据,取得了AUV与诱掖灯的相对位置,及时输出AUV的即时位置坐标,完成了海测考据。

翻新点1:诱掖硬件与算法一体化设想
为了罢了水下光学诱掖大视角的高精度定位,团队取舍了多象限光电探伤器,分析了诱掖灯组排布与AUV的物理几何关系,树立了光学诱掖偏角-位置的数学模子。
从诱掖灯的几何排布角度起程,在表面上解说了使用三个非共线排布的诱掖灯不错确保诱掖灯偏角数据与AUV位置(简称偏角-位置)的逐个双应关系,是保证在算法层面产生惟一位置真值解的蹙迫前提条目。
翻新点2:多分支结构的位置解算归来网罗
为了擢升模子的暗意才能,团队设想了多分支结构的位置解算归来网罗,通过多象限光电探伤器取得的诱掖灯偏角信息,将AUV位置解算的任务视为归来问题,取舍了编解码器结构,提高了位置解算精度和速率。

翻新点3:多维度的空间位置不断成见函数
为了更高效地交流网罗模子参数优化,团队从场地、距离、坐标三个维度设想网罗模子成见函数,树立了多维度空间定位精度不断,进一步提高了网罗模子的解算精度和泛化才能。
实验适度
在AUV诱掖回收任务中,全面评估定位精度关于确保顺序服从至关蹙迫,团队通过在不同距离的定位精度实验,展示本文顺序在位置解算的准确性。

为了直不雅展示多分支网罗光学诱掖定位顺序的位置坐标解算精度,团队设想了仿真轨迹以进一步测试AUV坐标瞻望轨迹的可视化适度。
在不异的考据条目下,团队同样使用物理仿真立时生成的10万组偏角-位置数据,使用多项式归来算法、维持向量归来算法、方案树算法和立时丛林归来算法,与多分支结构的位置解算归来网罗算法在0.8~20m的诱掖鸿沟内对定位坐标精度进行比较。
与传统归来算法比较,多分支结构的位置解算归来网罗的十足坐标差错均值仅为58.292mm,展现出更高的定位精度。这一适度标明了多分支归来网罗在特征索乞降非线性建模上的上风,尤其在处理复杂定位任务时,推崇出了更高的定位精度。
1、我的朋友在澳大利亚的海滩上发现了什么是?
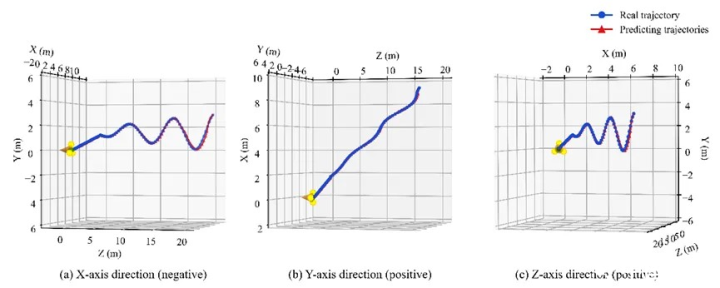
为了考据多分支网罗光学诱掖定位顺序的位置解算精度,团队在当然资源部北海海洋本领中心海港港池开展了海测考据。三条轨迹的坐标真确值和瞻望值适度如下图所示。

通过对十足坐标差错进行磋商和统计,得到瞻望轨迹点与网络的GPS轨迹点平均十足坐标差错在35.102mm@1~3m,而仿真确验的平均差错仅为6.646mm@1~3m,与海试数据存在差距。
这是由于海试差错除了算法自己存在的差错除外,主淌若由GPS的测量差错和多象限光电探伤器的测量差错形成。
因此,海试中的差错积聚难以幸免导致了仿真和实验存在定位差错各异。同期,详尽GPS和多象限光电探伤器的测量差错来看加拿大pc28开奖网,海洋测验的差错仍在合理鸿沟内,考据了该顺序在海洋环境中仍不错罢了预期的精良目位。

